Optimization with gradpy¶
At the core of therapy planning for IMRT is an optimization problem which answers the following question: What are the optimal parameters, i.e. beam intensities and collimator positions, for which a radiation dose can be delivered as close to the desired dose for a given region, respecting any additional constraints, such as maximum and minimum local doses? Such questions are commonly framed as minimizations of a cost or objective function which penalizes deviations from the target, as well as failure to satisfy imposed constraints.
This framework for solving optimization problems is quite general, and
has been addressed by a variety of numerical optimization methods. As
typical cost functions may be nonlinear with respect to the parameters
to optimize, we implement the Broyden-Fletcher-Goldfarb-Shanno (BFGS)
algorithm,
an iterative method used to solve nonlinear optimization problems. The
BFGS algorithm relies on an available gradient of the objective
function, to be provided by automatic differentiation using the
gradpy package, and builds an improved estimate of the Hessian
matrix at each iteration using the current solution and gradient
information.
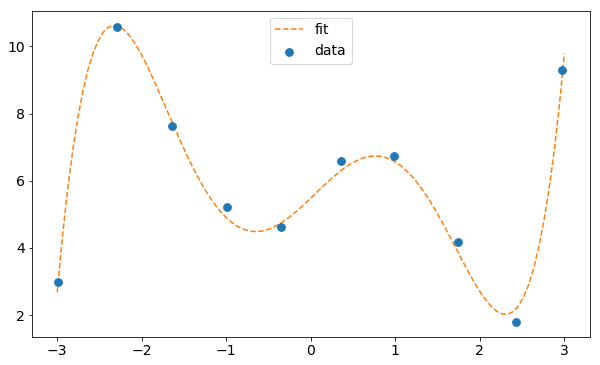
In the following example, we illustrate the use of our BFGS
implementation with gradpy to find the optimal parameters of a
polynomial fit to data. We start by importing the relevant modules and
define a set of random \((x,y)\) data points to fit by a polynomial:
In [2]:
from gradpy.autodiff import Var
from therapy_planner.bfgs import BFGS
import numpy as np
data = np.array([[-2.9902373, 2.98118975],
[-2.29029546, 10.58188901],
[-1.64611399, 7.63332972],
[-0.99102336, 5.20796568],
[-0.34860237, 4.60892615],
[ 0.36251216, 6.58063876],
[ 0.98751744, 6.74456028],
[ 1.74502127, 4.1763449 ],
[ 2.42606589, 1.80673973],
[ 2.9766883, 9.29002312]])
Next we define functions that will comprise the overall cost to
minimize. MS_error computes the mean squared error between the
target \(y\) and the polynomial fit poly. L2_reg is an L-2
regularization on the model parameters with weight alpha.
In [3]:
def poly(x,params):
return params[0] + sum([params[i]*x**i for i in range(1,len(params))])
def MS_error(x,y,params):
return sum([(poly(xi,params) - yi)**2 for xi,yi in zip(x,y)])
def L2_reg(alpha,params):
return alpha*sum([p**2 for p in params])
We choose a polynomial order and define a list of the corresponding
number of parameters needed. The cost function is defined as a sum of
the mean squared error and regularization contributions. As the cost is
a function of Var() objects in the params list, it is a
differentiable autodiff object.
In [4]:
order = 5
params = [Var() for _ in range(order+1)]
alpha = 0.1
cost = MS_error(data[:,0],data[:,1],params) + L2_reg(alpha,params)
Using the implemented BFGS algorithm, we pass in the function to
minimize (cost), parameters on which it depends (params), and an
initial guess for each parameter. As params is a list of Var
objects, the values are updated in place. The optimization returns the
final step size and number of iterations performed, reporting
Minimum found if the minimum is successfully obtained within the
specified minimum step size tolerance.
In [5]:
step, Niter, found = BFGS(cost,params,np.ones(len(params)))
fit_params = [p.value for p in params] # extract fitted parameters
Minimum found.
Finally, we visualize the data and the fit.
In [6]:
%matplotlib inline
import matplotlib.pyplot as plt
fig, ax = plt.subplots(1,1,figsize=(10,6))
ax.scatter(data[:,0],data[:,1],label='data',zorder=3,s=60)
x = np.linspace(-3,3,100)
ax.plot(x,poly(x,fit_params),linestyle='dashed',color='C1',label='fit')
plt.xticks(size=14)
plt.yticks(size=14)
plt.legend(loc='upper center',fontsize=14)
plt.show()